We are constructing a scanner system for GPR measurements. The scanner can place the GPR antennas at an arbitrary position within an area of 3 by 3 meter and with an accurary of 2 mm. Servo motors and servo controllers from the Danish Company JVL have been used. The servo controllers are operated through a standard seriel RS232 interface connected to a PC. All communication software is written in Matlab and developed from scratch at the Department.
If you are a student at DTU and interested in collecting GPR data, please contact Olav Breinbjerg.

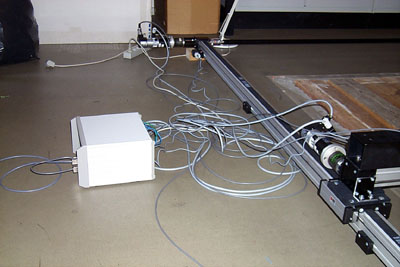
The 3 by 3 meter GPR scanner.

The JVL servo motor.

The JVL servo controller including power supply.


Niels-Ole Nielsen contructing equipment for making the GPR scanner mobile.

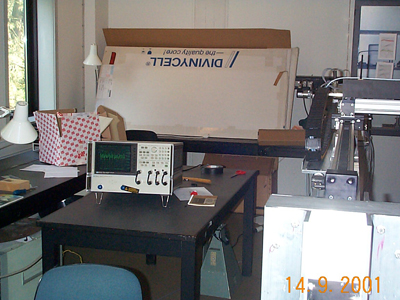
The data is collecting using an HP network analyzer and transfered to the PC using GPIB.
[Back to Research projects]